Digital Mortar is now part of PMY Group




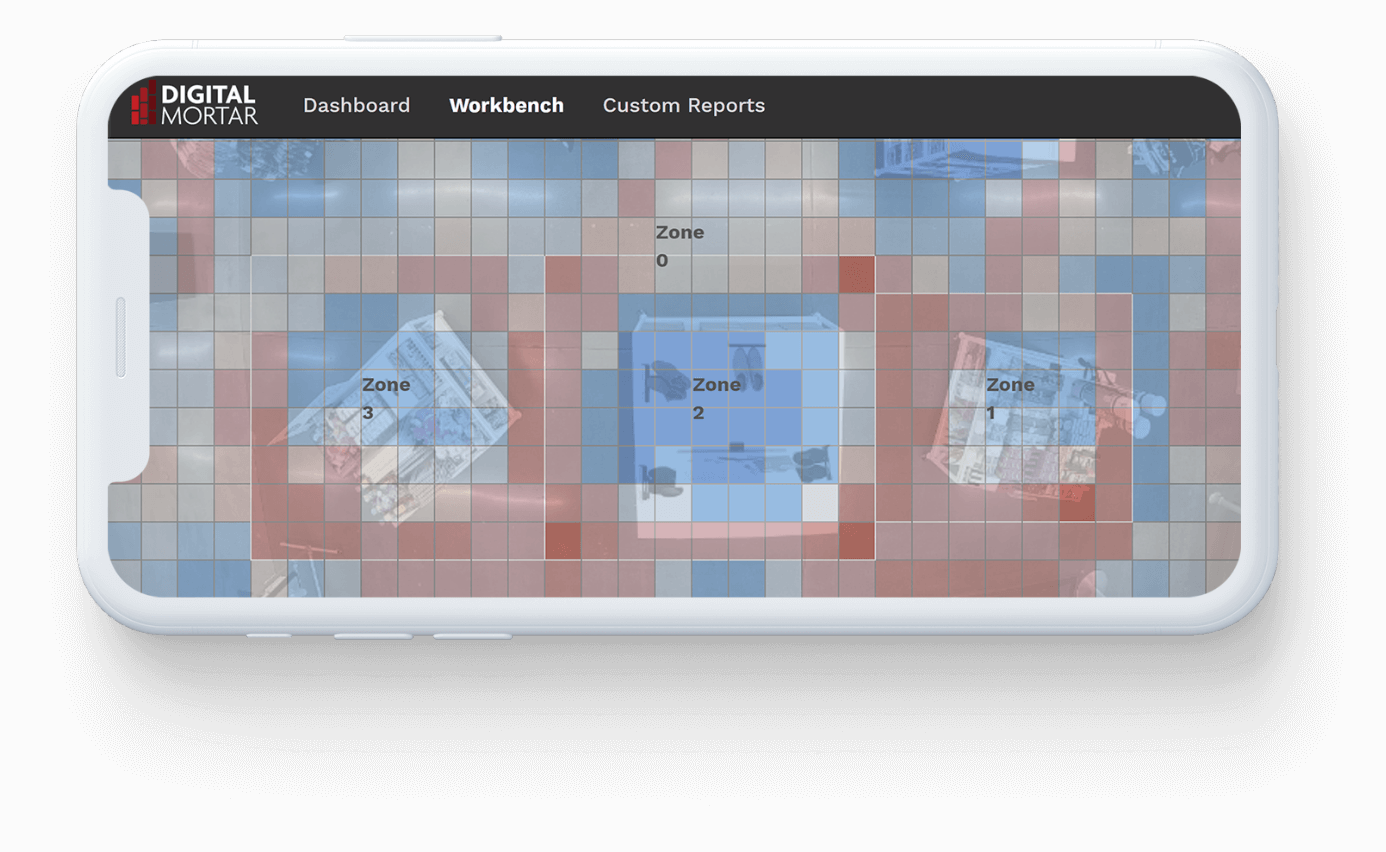
Comprehensive, integrated full people (and vehicle) journey measurement that delivers advanced path, queue, occupancy, throughput and space utilization capabilities into a single, power SaaS analytics tool measuring location performance.
End to end people journey analytics including heat mapping, pathing and funnel.
Airport, Retail, Mall Arena and Event
To learn what worked, why it worked and how well it worked for layout, staffing and experience.
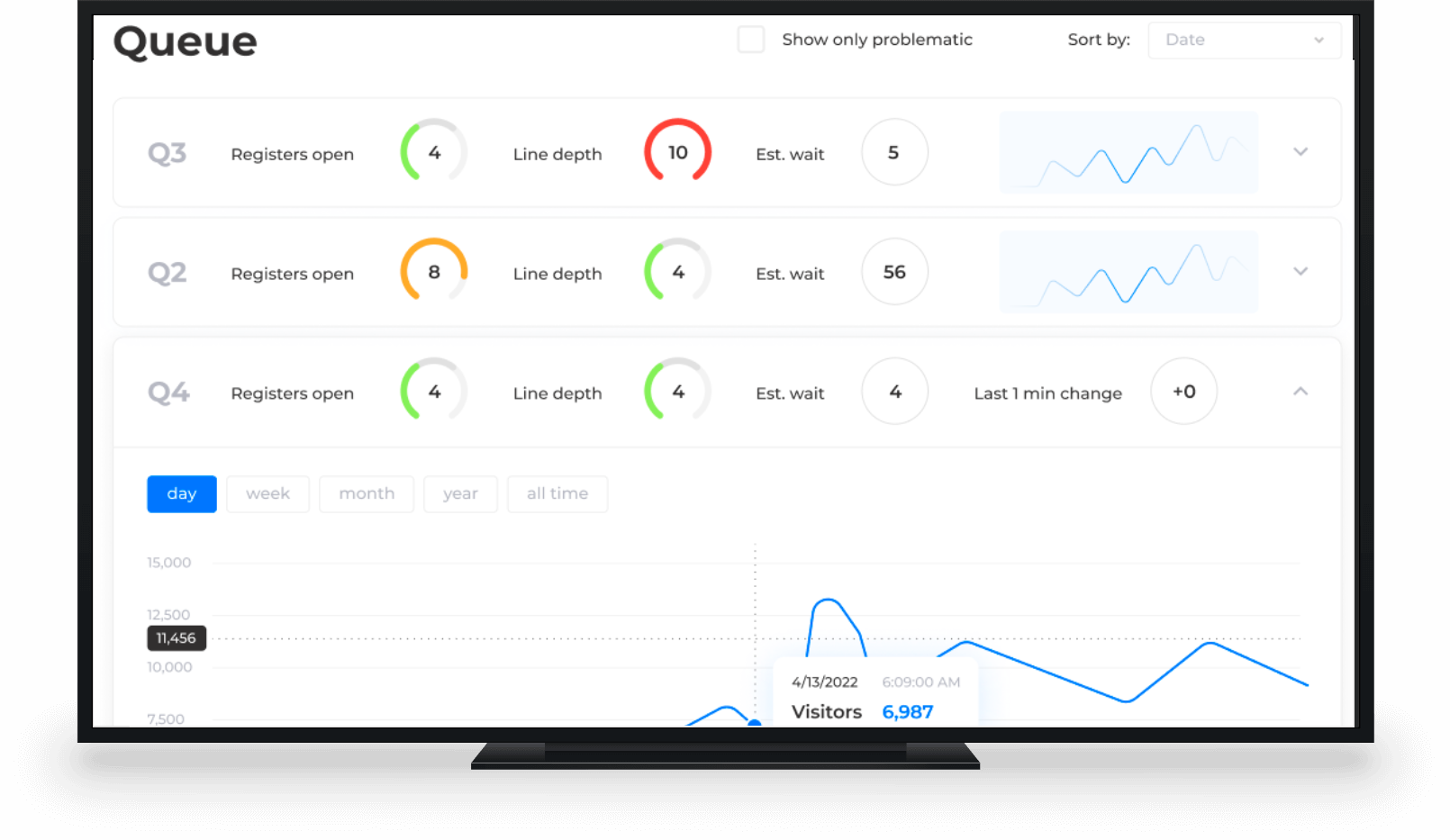
Real time maps and metrics showing where customers and associates are RIGHT NOW! The technology enable a host of real time operational use cases including line length management, shifting labor based on customer needs and occupancy threshold alerting.
Our intelligent queue tracking solution with machine learning based detection of groups and non-buyers delivers an accurate customer count and time at each phase of the checkout process.
Sub-second occupancy and queue tracking, alerting and analytics.
Retail, Fast Casual, Airports, Arenas and anywhere lines form.
Improve associate efficiency and allocation to reduce customer wait times, eliminate line abandonment and service immediate needs.
Visual merchandising is what makes the store work.
Measure every aspect of display performance (traffic, flow, engagement and even product interactions) with our machine learning analytics. Build structured testing programs that optimize the effectiveness and performance of store merchandising.
Comprehensive retail display measurement.
Retailer and CPG
Feedback on display effectiveness and the data needed to optimize placement, layout and product with structured testing.

Door Counting…Ho Hum? Not when we do it.
Powerful traffic comparisons, forecasting and visualizations. Integrated weather, events, PoS and staffing. Easy enough for Store Managers, powerful enough for analytics teams. DM Door Count delivers (a lot) more intelligence for (a lot) less.
Door counting hardware and software.
Retail, Mall, Restaurant, Office, Casino, University, Museum and more.
Understand traffic and conversion patterns to optimize staffing, marketing and fleet efficiency. Analyze entrances or interior spaces.
The best way to evaluate ANY enterprise software? See it in action.
Drop us a line and we’ll set up a time to walk you through our solution and answer any questions you have.